
Door WB-071:Luc van der Beek,Fabian Driessen, Džan Ireiz, Charlotte Raven, Tom Stikvoort, Jelske Verkuijlen,Sezgin Yildiz
Welkom op de site van onze grijper. Wij zijn een projectgroep van het eerste jaar werktuigbouwkunde aan de Technische Universiteit van Delft. Het team bestaat uit 7 studenten. Wij hebben onze krachten gebundeld om een grijper te ontwerpen die aan alle eisen en wensen voldoet. Wij hebben hier 8 weken hard aan gewerkt en zijn dus ook trots om hierbij onze grijper, ook wel ‘The Meanmachine’, op deze wijze te presenteren.

wie zijn wij
Luc van der Beek:
'In theory there is no difference between theory and practice. In practice there is.'
Unity is strength..
when there is teamwork and collaboration, wonderful things can be achieved.
~Mattie J.T. Spanek
Tom Stikvoort:
'Liever één vogel in de hand, dan géén hand.'
- Placide Smellekens
Sezgin Yildiz:
'Scientists dream about doing great things.
Engineers do them.'
-James A Michener
Fabian Driessen:
'Life is like riding a bicycle. To keep your balance, you must keep moving.' - Albert Einstein
Jelske Verkuijlen:
'To have a great idea, have a lot of them.'
Charlotte Raven:
'It takes a lot of time to be a genius. You have to sit around so much, doing nothing, really doing nothing.' -Gertrude Stein
Džan Ireiz:'Winners focus on winning, losers focus on winners.'
opbouw website
Onze site bestaat uit vier delen.
-
In deel 1 beschrijven we de conceptfase
-
In deel twee beschrijven we het verloop van de ontwerpfase.
-
In deel drie tonen we het uiteindelijk bereikte resultaat
-
In deel 4 kijken we terug op het volledige proces en evalueren we wat we de volgende keer beter kunnen doen.
Concept fase
De opdracht
De opdracht is het maken van een mechanische grijper die wordt aangedreven door drie pneumatische actuatoren.De grijper moet in staat zijn om een koffiebekertje vast te kunnen pakken en deze op een hoger gelegen platform te kunnen plaatsen. Hierbij moet het koffiebekertje dus omhoog en opzij kunnen bewegen.
De eerste paar keren dat we als groep bij elkaar kwamen, hebben we de mechanische grijper onderverdeeld in drie deelproblemen: de grijper, het gedeelte dat interactie heeft met het voorwerp, de arm, die de horizontale beweging moet bewerkstelligen en het derde deelprobleem is de verticale verplaatsing.
Deze drie deelproblemen hebben wij onderverdeeld in ons groepje. Elk tweeling hield zich dus bezig met een van de drie deelproblemen. We hadden toen nog geen rekening gehouden met de eisen. Ons gedachte was dat we beter kunnen brainstormen door geen beperkingen aan het ontwerp te stellen. Nadat we al een paar hele goede ideeën hadden bedacht, werd het tijd om de eisen, wensen en aannamen op te gaan stellen en op basis daarvan de ideeën te gaan combineren tot een geheel.





Op basis van deze aannamen, wensen en eisen hebben we alle bij elkaar verzamelde ideeën onder de loep genomen en hebben we de ideeën tegenover elkaar gezet en hebben we bepaald welk van de ideeën het beste aan de criteria voldeden.
de eisen
-
de grijper moet een bekertje met massa tussen 0 en 0.5 kg kunnen optillen
-
de inhoud moet in het bekertje blijven
-
De actuatoren moeten snel in-en uitgebouwd kunnen worden in onze constructie (circa 5 minuten)
de wensen
-
Makkelijk te bouwen
-
Grijper zo breed mogelijk openen
-
Arm hoeft niet ver uit te rekken richting het bekertje
-
Rekening houden met krachtverdeling!
-
We maken gebruik van 3 actuatoren
de aannamen
-
We beslissen zelf waar het bekertje staat
-
Je mag de slangetjes verwisselen
-
Er mag verder dan het bekertje gebouwd worden, geen beperking in de diepte
-
De beker kán nat zijn
-
We mogen zelf kiezen welke kant we het plateau mogen draaien (links of rechts)
-
We mogen de druk afdraaien
In de afbeelding hieronder ziet u een overzicht van alle ideeen die we hebben bedacht.
Zie hier het morfologisch overzicht voor de horizontale beweging

Door gebruik te maken van een morfologisch overzicht voor elk deelprobleem hebben we de verschillende ideeen tegenover elkaar gezet.



Ontwerp 1.
Na het morfologisch overzicht te hebben opgesteld, hebben we gekeken naar welke onderdelen goed met elkaar gecombineerd konden worden. Daarbij hebben we eerst naar een combinatie van deeloplossingen gekeken. Zie de figuur hieronder voor een voorstelling van deze combinatie.

Bij dit voorstel hebben we geprobeerd om het bouwen van de constructie zo eenvoudig mogelijk te houden. Door zo min mogelijk, en geen complex gevormde onderdelen te gebruiken is de constructie eenvoudig in elkaar te zetten. Daarnaast was de verwachting dat er weinig complicaties op zouden kunnen treden bij de productie van de perspex onderdelen. Dit was bijvoorbeeld ook een reden voor ons om een ontwerp waarbij gebruik werd gemaakt van een tandwiel ontwerp af te wijzen.
bewegingen
Verticaal
Voor de verticale beweging kozen wij voor een actuator bevestigd aan het bord en aan een vierstangen mechanisme. Hierdoor zou de grijper horizontaal blijven gedurende de verticale beweging. Een ander voordeel van deze constructie was dat er voor de verticale beweging niet veel extra onderdelen nodig waren. Omdat wij zelf de wens hadden om hooguit 3 actuatoren te gebruiken hebben wij er niet voor gekozen om een extra actuator aan de verticale beweging te besteden.
Horizontaal
Voor de horizontale beweging kozen wij voor een roterende schijf waarop de grijper werd bevestigd. Dit omdat wij niet de gehele constructie wilden draaien, of een extra lange arm aan het vierstangen mechanisme wilden bevestigen om de benodigde horizontale beweging alsnog te kunnen bereiken. Met deze constructie zou met een relatief kleine beweging de grijper over een grote hoek gedraaid kunnen worden, terwijl de totale constructie zo min mogelijk verlengt werd. Ook voor deze beweging was slechts één actuator nodig, wat voor onze wens van 3 actuatoren benodigd was.
Grijper
Voor het openen en sluiten van de grijper kozen wij er voor om de actuator op slechts één vinger aan te laten sluiten. Omdat wij aannamen dat wij zelf het object in de grijper mochten plaatsen levert dit geen problemen op voor het vast pakken van het object. Door de actuator op deze manier aan te sluiten hadden we ook minder materiaal nodig voor de grijper dan dat bij andere concepten voor de grijper het geval zou zijn. Om de wrijving tussen de vingers en het object te vergroten is er besloten om de binnenkant van de vingers te bekleden met rubber. (Berekeningen?) Om na het weg zetten van het object de grijper weg te kunnen bewegen zonder het object om te stoten, is er gekozen om het verticale bereik van onze constructie zodanig te maken dat wij de grijper over het object heen kunnen tillen. Ook hier werd wederom gebruik gemaakt van 1 actuator om de benodigde beweging te bewerkstelligen.
Besluit tot verandering concept.
Nadat wij deze onderdelen hadden samengevoegd bespraken wij de algemene voor en nadelen van de gehele constructie. Hierbij hadden wij vooral onze twijfels over de verticale beweging. De benodigde kracht die de actuator zou moeten leveren om de gehele constructie verticaal te laten bewegen lag dicht bij de maximale kracht die die actuator volgens de experimenten in week 2 kan leveren. Omdat wij de marges vrij riskant vonden hebben wij gekeken naar enkele oplossingen. Hierbij hebben we nagedacht over de mogelijkheid om met behulp van een contragewicht of veren de benodigde kracht voor de verticale beweging te verkleinen. Dit hebben we echter verworpen omdat het hierdoor erg lastig zou zijn om de grijper ook weer naar beneden te laten bewegen. Aangezien de massa van het object aanzienlijk groter is dan de massa van de perspex onderdelen, zou de benodigde kracht niet significant verlaagd worden zonder dat het niet meer mogelijk werd om de constructie in zijn oorspronkelijke staat terug te krijgen. Daarnaast hebben we nog overwogen om dit probleem te omzeilen door een actuator toe te voegen. Dit zou echter betekenen dat wij daardoor meer dan drie actuatoren nodig zouden hebben, wat tegen onze gestelde wens in ging. Dit idee is dan ook verworpen.
Na overleg met de project docent is er daarom besloten om over te stappen naar een ander ontwerp om de verticale beweging te bewerkstelligen.
nieuwe beweging
Verticaal
Bij dit ontwerp maken we gebruik van katrollen om de gehele constructie verticaal te bewegen (zie fig. 1)
en filmpje prototype(in deel:ontwerp fase). De grijper word bevestigd aan een plaat die via een rails wordt opgeheven. Door gebruik te maken van deze constructie zouden we ook het bereik in de verticale richting kunnen vergroten, wat nodig was om de grijper over het object heen te tillen. Een ander bijkomend voordeel van deze constructie is dat wij de afstand van het bord tot de grijper konden verkleinen, waardoor er minder kracht nodig zou zijn voor de verticale beweging. Aangezien de krachtoverbrenging bij dit concept efficiënter zou zijn, en de benodigde kracht lager, was het niet nodig om een extra actuator te gebruiken. De wens voor een maximaal van drie actuatoren bleef hierdoor staan.
Horizontaal

Omdat wij de grijper nu dichter naar het bord konden verplaatsen, is er alsnog gekozen voor een simpele arm in plaats van de draaiende schijf. Dit omdat wij hierdoor minder materiaal nodig hadden.

Ontwerp fase
Nadat we in de conceptfase het ontwerp hebben gekozen wat het beste uit het morfologisch overzicht kwam, hebben we een krachtenanalyse gemaakt. Een krachtenanalyse is een belangrijk onderdeel van het project. Het is namelijk essentieel om te weten welke krachten waar op de grijper uitgeoefend worden en hoe groot deze krachten zijn. Daarnaast hebben we verschillende berekeningen gemaakt om de werking van de grijper zo goed mogelijk uiteen te zetten.
Matlab berekening moment:
Krachtenevenwicht
Zwaartepunt grijper



Vervolgens zijn we begonnen met het maken van een prototype. Deze hebben we gemaakt met behulp van karton, lijm, ductape, pinnen en touw. Door dit prototype kregen we een goed beeld van de werking van onze grijper. Hier is een filmpje te zien van het prototype.
Daarnaast hebben we ons ontwerp ook in Solidworks gezet. Dit om een duidelijk en overzichtelijk 3D beeld te geven van ons ontwerp. Deze zijn hieronder te zien.


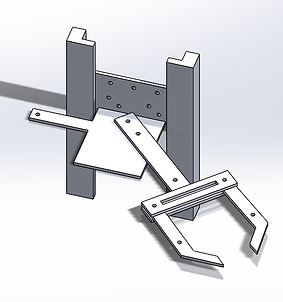
Om vervolgens onze werkelijke grijper te kunnen maken, moesten we aan de goede materialen komen.
Grotendeels was dit geen enkel probleem,we konden veel van de onderdelen uit Perspex laten maken en
hadden verder nog enkele onderdelen uit hout en staal gemaakt. Alleen bij de katrollen die we nodig
hadden voor ons ontwerp, liepen we tegen ons eerste obstakel aan: we hebben geprobeerd om beide katrollen uit perspex te maken. Er bleek echter dat het niet mogelijk was om deze uit perspex te produceren omdat we niet over voldoende materiaal beschikten om zowel de katrollen als de rest van de grijper te maken. Uiteindelijk moesten we voor de grote katrol met een andere oplossing komen. Omdat de constructie de week hierna al in elkaar gezet moest worden, hebben wij gekeken naar andere mogelijkheden om aan de grote katrol te komen.
Wij hebben hiervoor zowel online als bij verschillende winkels gekeken naar katrollen die aan onze eisen voldeden. Helaas waren deze katrollen simpelweg te duur of was het erg lastig om ze aan te sluiten op de rest van ons systeem.
Daarnaast hebben we ook gekeken naar de mogelijkheid om de katrollen zelf te produceren uit andere materialen. Wij hebben hierbij vooral naar hout gekeken als optie, omdat wij dit met de tot ons beschikbare gereedschappen konden bewerken. Het bleek echter dat het niet goed lukte om op deze manier binnen de beperkte tijd waar wij nog over beschikten een katrol te produceren. Mochten wij hier meer tijd voor hebben gehad dan was dit wellicht alsnog gelukt.
Omdat wij helaas het systeem met de katrollen moesten uitsluiten, was het noodzakelijk om over te schakelen naar plan B. Wij hebben er voor gekozen om een simpel hefboom systeem te maken. Dit is eigenlijk een versimpelde versie van ons katrollen systeem (Zie plaatjes hefboom/katrol) en verminderde afstand . Dit systeem werkt echter niet zo goed als het systeem met de katrollen, maar we bereiken hiermee wel een gewenste verticale beweging.



hier zijn foto's te zien van het ontwerpproces


Resultaten
zie hier het uiteindelijke resultaat
Reflectie
Het leerproces om een goed ingenieur te worden kan vergeleken worden met het operante conditioneringsproces uit de biologie. Het leren gaat door middel van ‘trial and error’. Waarmee ik wil zeggen dat er fouten gemaakt zullen moeten worden om later in staat te kunnen zijn deze te voorkomen. En fouten gemaakt, dat hebben we.
Fouten maken hoort er dus bij, maar het degelijk reflecteren van deze fouten om de oorzaak te achterhalen is net zo belangrijk. Daarvoor is dit zogeheten ‘evaluatierapport’. Het doel is om een korte analyse te geven van de meest bepalende fouten die gemaakt zijn tijdens dit eerste project. Dit is gemaakt op initiatief van de hele groep, en is dan ook besproken met de hele groep.
De eisen
In de algemene analyse zijn de eisen, wensen en aannames al genoteerd. Dát we ons hiermee bezig hebben gehouden is een feit. Of we ons hiermee op de juiste manier hebben bezig gehouden is een belangrijke vraag die gesteld moet worden om een beter en zorgvuldiger proces te kunnen realiseren bij het volgende project. Het opstellen van de eisen is ietwat rommelig verlopen. Een volgende keer moét dat eerst gebeuren voordat we ook maar aan iets anders beginnen. In het geval van dit eerste project wat het zo dat er steeds eisen bij kwamen of werden verworpen. Dit zorgde voor een enigszins chaotische manier van werken.
Discussie: de ‘waarom-vraag’ ontbreekt
In de conceptfase is het ten eerste belangrijk dat er zo veel mogelijk ideeën bedacht worden waarbij vindingrijkheid een belangrijk iets is (het brainstormen). Daarnaast is het echter ook belangrijk om de bruikbaarheid van deze ideeën te toetsen aan de hand van de opgestelde eisen, aannames en wensen.
Dit tweede is waarbij het in de groep fout ging. Waar het, in de algemene analyse beschreven, plan om het denken over de drie verschillende mechanismen (verticale en horizontale beweging, grijper) te verdelen onder de personen binnen de groep, goed was, pakte het minder goed uit dat gehoopt. Het probleem was dat er te weinig discussie plaatsvond. Een bedacht idee voordroeg aan de groep, werd er weinig tot niet door de groep een onderbouwing geëist, en de functionaliteit van het concept werd voor lief genomen. “Waarom werkt het zo?”, “Kan je dat theoretisch aantonen?”, “ Waarom dit, en niet dat?”, zijn voorbeelden van vragen die nauwelijks in onze vergaderingen gesteld werden, en wel hadden moeten worden. Kortom: de ‘waarom vraag’ ontbrak
Dit klinkt misschien als een klein iets, maar het heeft een sleutelrol gespeeld in het niet behalen van onze doelen. Het soepeler, en ook effectiever verlopen van een volgend project vereist meer kritiek op elkaars ideeën, betere terugkoppeling en dus meer betrokkenheid van iedereen om het product te verkrijgen waar we tevreden over kunnen zijn. Het is belangrijk dat we elkaar uitdagen om op deze manier een product van hogere kwaliteit te kunnen leveren.
Inlezen
Het is belangrijk om bij het ontwerpen van mechanismen de technische mogelijkheden goed in acht te nemen. Indien dit niet goed gebeurd, duiken er in de loop van het project allerlei technisch problemen op, die doen veroorzaken dat er tijd en moeite verspild moeten worden in een poging om een passende oplossing te vinden. Zoals net gezegd: de ideeën waren er, maar discussie ontbrak. Dat manifesteert zich mede in hetgeen ik nu ga bespreken.
Wat in de loop van het proces bleek, was dat er in de conceptfase onvoldoende informatie verzameld was over de mogelijkheden met betrekking tot de technische aspecten. Wat net besproken is, namelijk dat de functionaliteit voor lief werd genomen, is er ook te weinig discussie geweest over de manier van produceren. In het morfologisch overzicht dat gemaakt is voor de drie afzonderlijke onderdelen, is de term ‘productiemogelijkheid’ voorgekomen en meegenomen in de afweging voor geschiktheid voor onze grijper, maar daar hield het op. Ja, iets werd als realiseerbaar bestempeld, maar hoe we het zouden gaan realiseren, daar werd minder goed over nagedacht. Er werd maar gewoon aangenomen dat het gerealiseerd kon worden.
Een voorbeeld is het bedachte poeliesysteem. Op de helft van het project werd duidelijk dat dit plan, met ons budget, niet realiseerbaar bleek te zijn. Gelukkig waren we in staat om een simpele, makkelijk realiseerbare oplossing voor dit probleem in een korte tijd te bedenken, maar het had ons een hoop stress bespaart als er eerder in het project beter onderzoek gedaan zou zijn naar hoe realiseerbaar het idee nu werkelijk is.
Dit probleem geeft niet alleen betrekking op het poeliesysteem. Meerdere aanpassingen en oplossingen voor problemen die opdoken moesten in een korte tijd gedaan en bedacht worden. De overhaaste beslissingen die dan genomen moeten worden hebben natuurlijk geen positief effect op het eindresultaat.
Plan B
We betrapten onszelf erop dat we een beeld schetsen waarbij het lijkt alsof het mogelijk is een perfect lopend project te bewerkstelligen. Het punt is: het loopt natuurlijk nooit perfect, ook al zouden we al deze punten te harte nemen. Er gaan dus altijd dingen fout en er zijn dus altijd obstakels waar we overheen moeten, of, als het obstakel te hoog is, er omheen door middel van een van te voren opgesteld plan B.
Dit is een probleem geweest tijdens het project dat wederom te wijten is aan te weinig discussie. Waar in ons proces bijna niet over nagedacht is, is wat we moeten doen als iets niet gaat zoals verwacht. Het is belangrijk dat we dit de volgende keer wél doen. Dit zal ons onnodige stress besparen en ons helpen om via een omweg toch een resultaat te behalen.
Dit zijn de belangrijkste punten van verbetering die in het gesprek met de groep naar boven kwamen. Ik hoop een beeld geschetst te hebben van de fouten die gemaakt zijn. Dit stelt ons in staat om bij het volgende project sommige dingen anders aan te pakken. Het zal zorgen voor minder stress en een beter resultaat.